




最新新闻
必一sport网页版登录
电 话:029-65616388
传 真:029-89281463
联系人:康经理
手 机:15309255931
15353517803
网 址:m.bjcqzc.com
邮 箱:info@bjcqzc.com
地 址:西安市高新技术产业开发区科技六路中段23号
b体育官网.哈工大MTABot:一种结构简单的可变形陆空机器人
所属分类:智能服务机器人
- 点击次数:10
- 发布日期:2024-03-15 01:48:55
- 来源:必一sport网页版登录
- 作者:B—sports必一
- 在线询价
- 详细介绍
陆空机器人结合了无人机和地面车辆的优势,具备空中快速穿越和陆地长时间任务执行的能力,应用前景广阔。
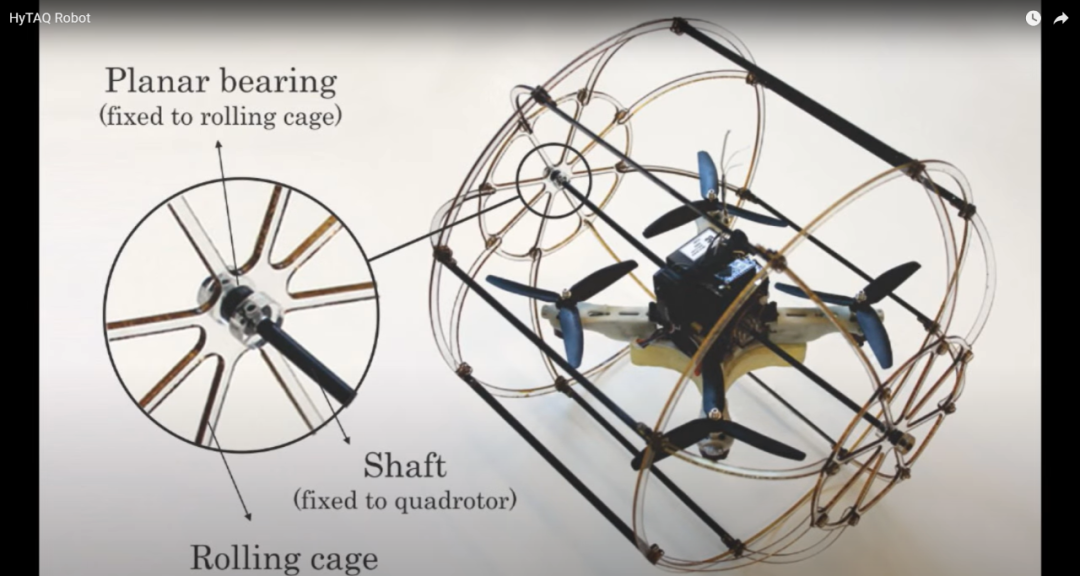
被动轮型机器人结构简易,但在崎岖地形中表现不佳,能源效率较低。伊利诺理工大学开发的HyTAQ便是这一类型的代表性案例,其设计将滚动笼安装在四旋翼无人机的外部,实现了飞行与地面移动模式下执行器和控制系统的共享。受其启发,后续设计涌现出多种被动轮机器人变体,但共通缺点是在不平地面稳定性差,易碰撞失控;且转子驱动行走效率低,螺旋桨近地操作还会扬尘影响视觉传感器。
主动地面机制型机器人在非结构化环境中适应性强,行走效率高,但空中动作功率效率低。为了解决这一问题,有学者提出了一种多功能附件的机器人概念,这类机器人通过灵活运用同一运动机构,可实现多样移动模式,进而提升机器人机动性和环境适应性。由加州理工学院和美国东北大合开发的M4机器人便是这一模式的典型案例。但其设计和系统结构的复杂性通常被视为过度且繁琐。这种设计的冗余不仅增加了制造成本和维护难度,还可能导致可靠性和效率的降低。

该研究创新性地提出了一种名为MTABot的新型可变形陆空机器人。MTABot巧妙地融合了双旋翼飞行器与可变形轮子的设计,其核心是一个集成了转子和可变形轮子的多功能附件。这种独特的设计使得MTABot能够灵活切换在平坦地形上的滚动、攀爬楼梯以及在空中飞行的三种运动模式。

图4 可变形的陆空机器人。(a) 滚动模式的配置。(b) 爬升模式的配置。(c) 飞行模式的配置。
这项创新设计仅凭两个多功能附件,便实现了滚动、攀爬和飞行三种运动模式,赋予了MTABot在平坦地形上的高速移动能力,在复杂地形中的攀爬能力,以及越过大型障碍的能力。通过实验,研究人员验证了MTABot克服多种地形的能力,证实了这一设计的有效性和实用性。
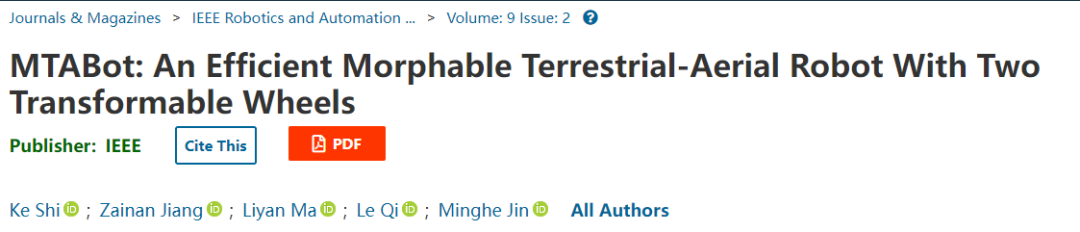
MATBot由一个中央主体和两个多功能附肢构成,采用对称的设计布局。其总质量大约为2.2千克,结构如下图所示。
每个多功能附体包含了可变形轮子和安装在轮子上的转子,以及必要的连接和传动机构。这些附件由三个电机控制:统一电机、变换电机和螺旋桨电机。统一电机兼具轮驱和飞行舵控的双重功能,这一设计原则意在尽可能减少电机数量。变换电机负责辅助模式转换,而螺旋桨电机则负责驱动转子。
机器人的主体内部安装了电池、主、运动和电机驱动器等关键电子组件。尾部的杆状结构固定于机身,当MATBot穿越障碍或在不平坦表面移动时,杆状结构提供必要的支撑力和反作用力。
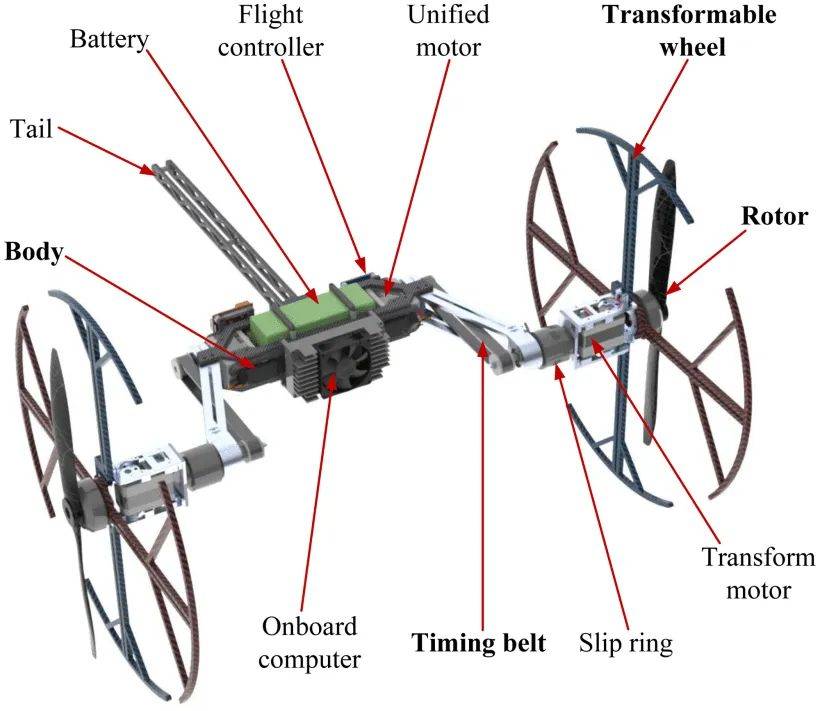
上图展示了MTABot的电气架构。这款机器人由一块22.2V的锂电池供能,该电池配备了电源管理模块。它采用STM32H743系列的ARM微,并集成了IMU(惯性测量单元)芯片,以精确执行多模态运动控制。主控大脑是Jetson Xavier NX模块,辅以WiFi模块来接收远程信号,以及光流芯片以优化飞行定位。
推进力由两个T-motor Antigravity MN4006电机提供,每个电机能够产生高达1.65千克的推力。统一电机和变换电机分别使用的是Feetech SM45BL和STS3235型号,确保了机器人在滚动、攀爬和飞行模式间高效转换的能力。
如下图所示,MTABot采用了一种创新的可变形轮设计。在优化设计中,车轮半径和扇形角是针对固定式wheg组件的关键参数。可变形轮由两个独立的“轮”组件构成:一是与轮轴相对固定的固定轮;二是由位于轮轴中央的变换电机驱动的主动轮。这种结构使得轮子能够从传统的圆形转变为配有爪子的异形轮,从而协助机器人从滚动模式切换至攀爬模式。这一独创的车轮设计赋予了MTABot卓越的越障能力。
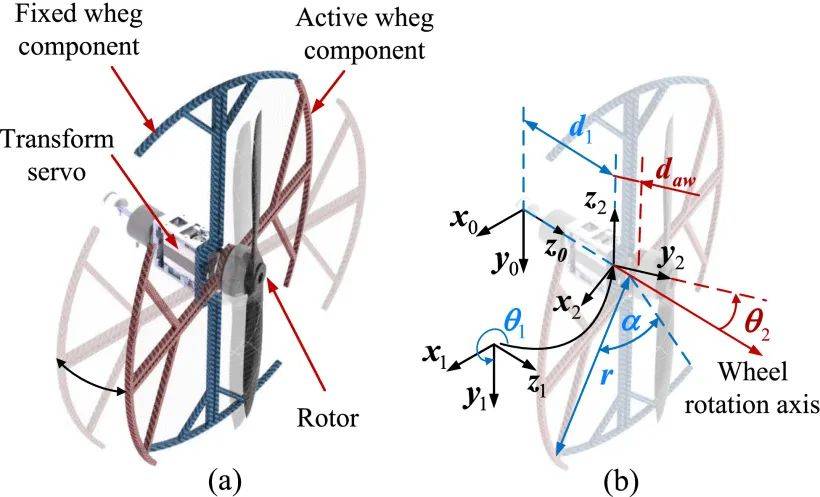
图7 MTABot机器人可变形轮结构图。(a) 可变形轮的组成。(b) 坐标系和符号的定义
多功能附件的构成包括与主动轮刚性连接的转子。传动机构的核心是统一电机驱动的同步带机构,这是实现机械动力传递的关键部件。变换电机的作用是驱动轮子折叠,从而使得机器人能够简单地从陆地运动模式转换至飞行模式。在飞行模式下,变换电机会保持固定不动,确保稳定飞行。
虚线框在下图中标示了多功能附件的范围。在设计优化过程中,一个关键参数是轮轴相对于机器人重心(BCoG)的偏移量,这个参数可以通过调节两个同步带轮之间的中心距离来调整。
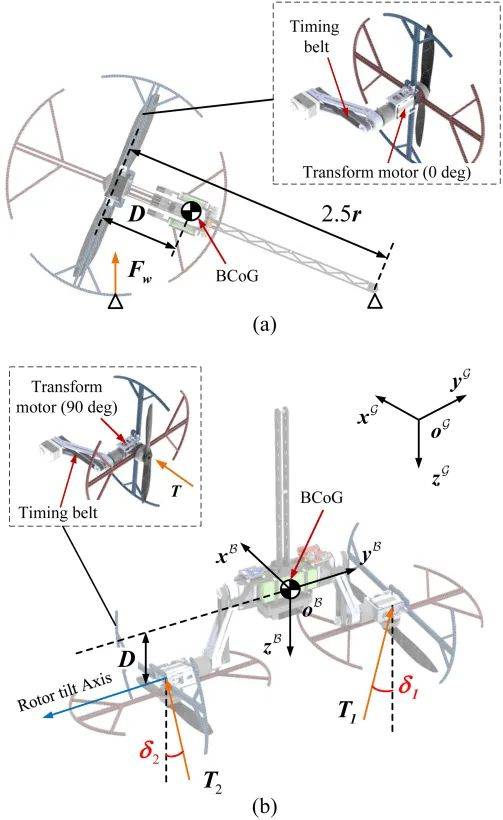
图8 MTABot机器人滚动和飞行模式的配置图。(a) 滚动模式下的符号定义。(b) 飞行模式下坐标和符号的定义。
机器人的重心定位(BCoG)对其滚动、攀爬和飞行性能有着显著影响。在双轮机器人设计中,减少轮轴与BCoG的偏移量有利于提升牵引力。而在双旋翼飞行器的设计中,增加轮轴与BCoG的偏移量可以提高飞行时俯仰运动的响应速度。
在滚动模式下,如图8(a)所示,为了保持机器人的紧凑尺寸,通常会限制机器人的总长度,这也是四轴飞行器配置实现最小尺寸的常见设计方法。
MTABot的设计考虑了多种运动模式及其转换,包括滚动模式、攀爬模式、飞行模式,以及从滚动到攀爬、从陆地到空中的过渡。为了实现这些运动模式和顺畅的模式切换,MTABot采用了精心设计的控制策略。
1)滚动和攀爬模式:MTABot在滚动和攀爬模式下采用基于PID(比例-积分-微分)控制的两轮差动系统。这一部分控制方案简单且成熟,因此不需要进一步详述。
2)滚动到攀爬的变换:如图8所示,MTABot通过旋转主动轮来实现从滚动模式到攀爬模式的转变。主动轮的旋转角度是可以调整的,这使得机器人能够根据障碍物的大小来改变轮子的变形程度。面对较小的障碍物时,机器人会采用较小的旋转角度以提升变换效率;而在遇到较大的障碍物时,则会增大旋转角度以增强越障能力。由于机械设计的限制,主动轮的最大旋转角度被设定为40度。
为了在模式转换过程中保护螺旋桨并减轻变换电机的负担,研究人员设计了一种程序化的地空转换策略。
3.统一电机继续向前旋转,利用爪子提供的支撑力提升机器人本体并开始旋转,直到尾杆达到垂直状态,此时机器人完全转换为双旋翼构型,准备起飞。
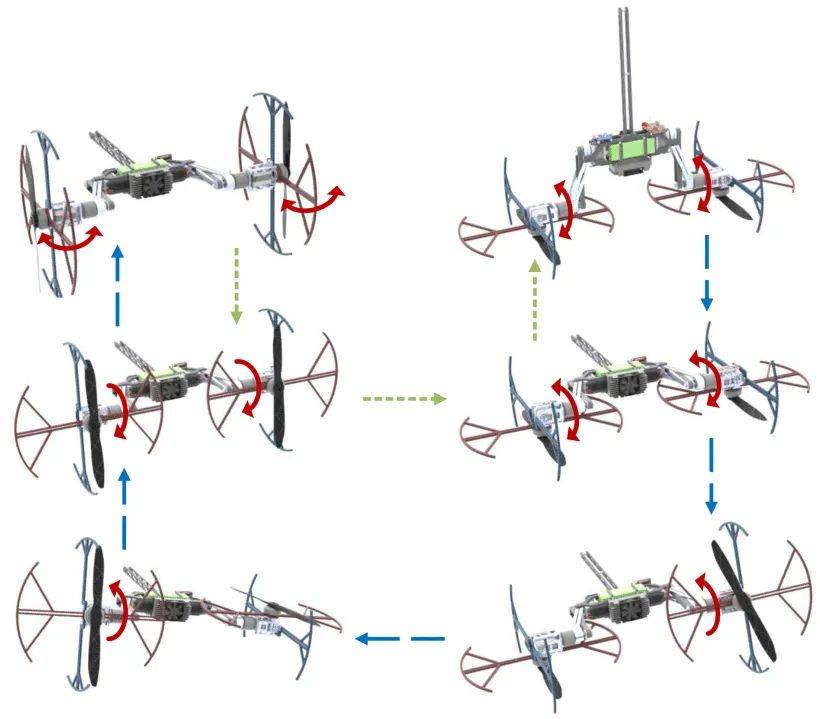
从双旋翼构型平滑过渡回到可变形两轮构型,则遵循了图9中蓝色虚线.统一电机开始向后旋转,以降低机器人本体和尾杆的高度,引导它们缓慢下降至接近地面。
在传统双旋翼飞行器的姿态控制系统中,由伺服舵(servo flaps)产生的惯性扭矩通常与机身姿态调整所需的目标扭矩相抗衡,这一现象为飞行器的控制带来了显著挑战。在MTABot的设计中,这一问题得到了有效解决。
具体来说,在MTABot的姿态控制系统中,伺服舵的惯性扭矩实际上有助于实现目标姿态的控制。
实验所用MTABot原型机采用碳纤维材料制成,同时关键承力结构使用了铝合金制作。在滚动模式下,MTABot长度为 620 毫米,宽度为 578 毫米,车轮直径为 356 毫米。在飞行模式下,MTABot的螺旋桨轴距为468毫米,高度为530毫米。
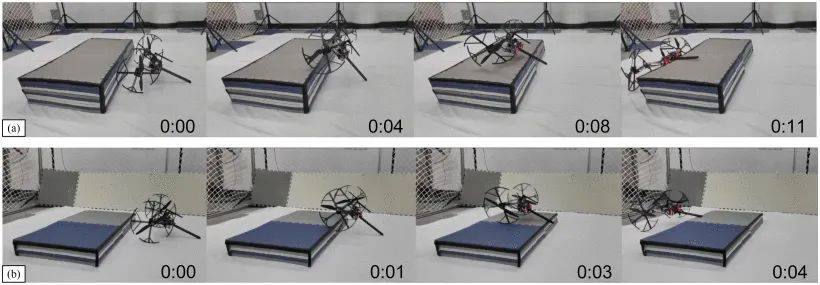
如图10所示,MTABot在室内进行了多轮攀爬实验,主动轮的旋转角度在不同测试中有所变化。在图10(a)的条件下,设置了220毫米高的障碍物,超过了MTABot车轮半径的1.2倍。而图10(b)展示了一个较低的障碍物,高度为110毫米,大约是MTABot车轮半径的0.6倍。
图11总结了MTABot在不同主动轮旋转角度下,穿越两种尺寸障碍物的成功率。成功率计算取决于车轮的角位移,较小的角位移通常与较高的成功率相关,最高可达100%。

图11中的数据反映了MTABot克服不同高度障碍物的性能。较大的障碍物需要更大的角位移,而较小的障碍物则需较小的角位移即可。在图10(a)条件下,MTABot利用较大的角位移
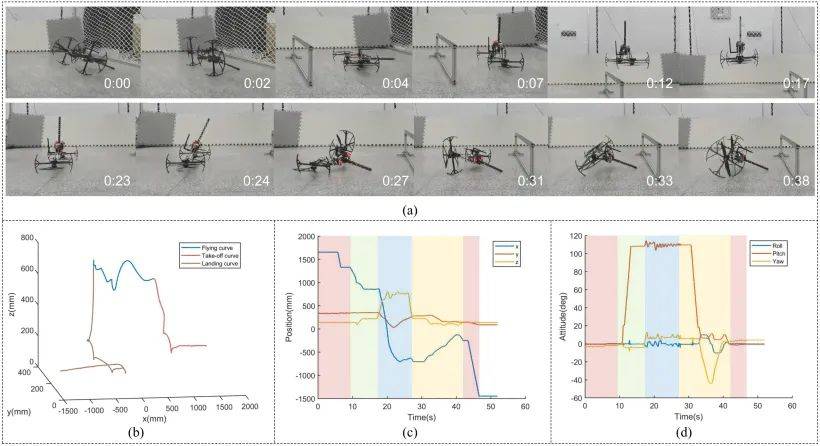
图12呈现了实验结果,其中图12(a)显示了从综合运动视频中抓取的静态帧。为了更清楚地展示机器人在每个阶段的姿态,图12(c)和(d)使用色块进行了区分。
1) 机器人以滚动模式平稳移动,对应于图12(a)中的0:00标记以及图12(c)和(d)中的首个红色区域。
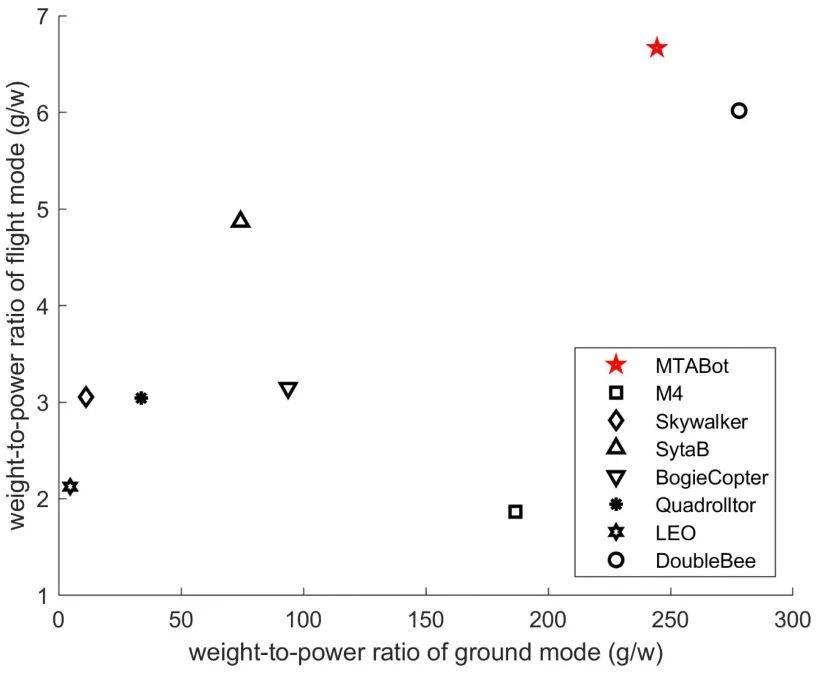
图13提供了与其他几种典型陆空机器人的比较分析,这些机器人包括Quadrolltor、SytaB 、BogieCopter、Skywalker、LEO、M4和DoubleBee。从展示的数据来看,MTABot在空中的效率表现卓越。在地面效率方面,只有DoubleBee超过了MTABot,但由于DoubleBee的数据没有速度限。
必一sport网页版登录
陕ICP备16005197号-39 Powered by 祥云平台 技术支持: 祥云平台





 在线咨询
在线咨询



